


埃夫特小型机器人
适用场景:可应用于搬运(机床上下料)、分拣、组装、打磨、抛光、弧焊等各种场景。
适用行业:适用于PCB、电子制造、橡塑、金属制品等行业。
特点:具备工作范围广、负载能力强的特点,高刚性的手腕设计和控制算法,可以提高机器人的定位精度和动态性能,重复定位精度最高可达到0.03mm,定位时间0.2s;全封闭机械本体,结构紧凑,占地面积小仅为260 mm*260 mm,具备高防尘防水性能,以及特殊应用配置的二次防护特性。

01具备工作范围广、负载能力强的特点
02高刚性的手腕设计和控制算法,可以提高机器人的定位精度和动态性能
03重复定位精度最高可达到0.03mm,定位时间0.2s
04全封闭机械本体,结构紧凑,占地面积小仅为260 mm*260 mm
05具备高防尘防水性能,以及特殊应用配置的二次防护特性

Operating ranges


可达半径:600mm
控制轴数:4
手腕可搬运质量:22kg

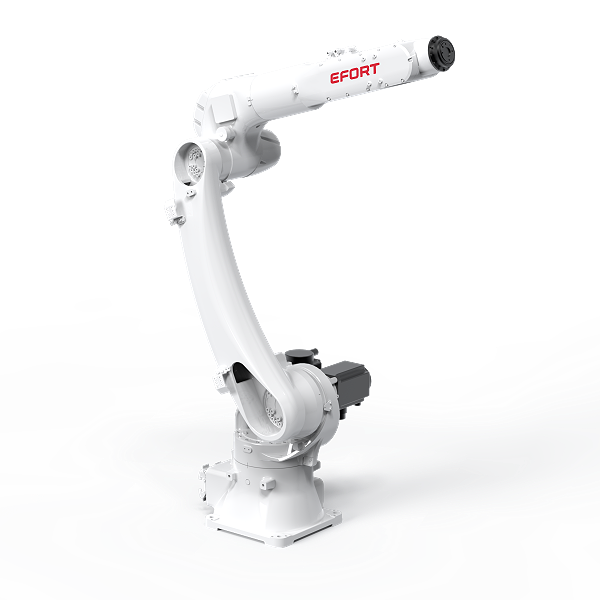
可达半径:1391mm
控制轴数:6
手腕可搬运质量:12kg
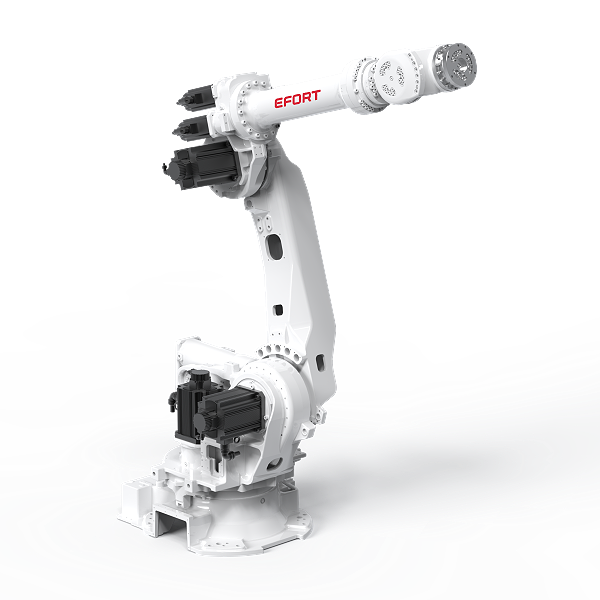
可达半径:1850mm
控制轴数:6
手腕可搬运质量:25kg
.
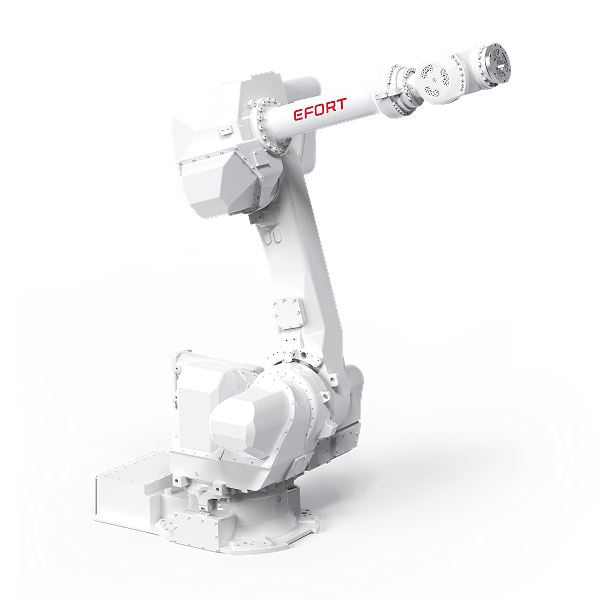
可达半径:2674mm
控制轴数:6
手腕可搬运质量:210kg

可达半径:3074mm
控制轴数:6
手腕可搬运质量:10kg
可达半径:2674mm
控制轴数:6
手腕可搬运质量:210kg
.